Traditional integration vendors mainly implement test platforms through simple instrument combinations. Due to the lack of in-depth understanding of measurement principles and research and development experience, it is difficult to provide complete functional customization services based on customer needs. With its deep understanding and long-term accumulation in the field of power analysis and motor measurement, Zhiyuan Electronics integrates the concept of instrument design and system integration, and launches an epoch-making MPT intelligent motor test and analysis system that supports control precision, analysis capability and international standards. In three aspects, the motor test system has been completely innovated to meet the deep requirements of different industries for motor testing, and to achieve a more professional and tailored service that suits the needs of users.
Next, we will discuss a more easily overlooked detail indicator in the motor test platform: control error.
Traditional motor test platform control error The traditional motor test platform can only provide open-loop control of the motor speed and torque, ignoring the error introduced by the fixture and motor load, and can not provide users with accurate motor measurement results.

Causes of Error The causes of speed and torque error in the motor test system (dynamometer) can be summarized as follows:
1. In the motor drive system, when the torque output by the motor is transmitted to the sensor or load through the clamp, a small part will be lost as friction torque. Therefore, in order to drag the load normally, the motor will output a slightly larger torque than the load, causing an error between the torque measurement value and the set value.
2. The motor load itself has a control error, and the control signal does not exactly match the actual load torque;
3. Because there is a functional relationship between the speed and the torque, the above two errors also affect the speed.
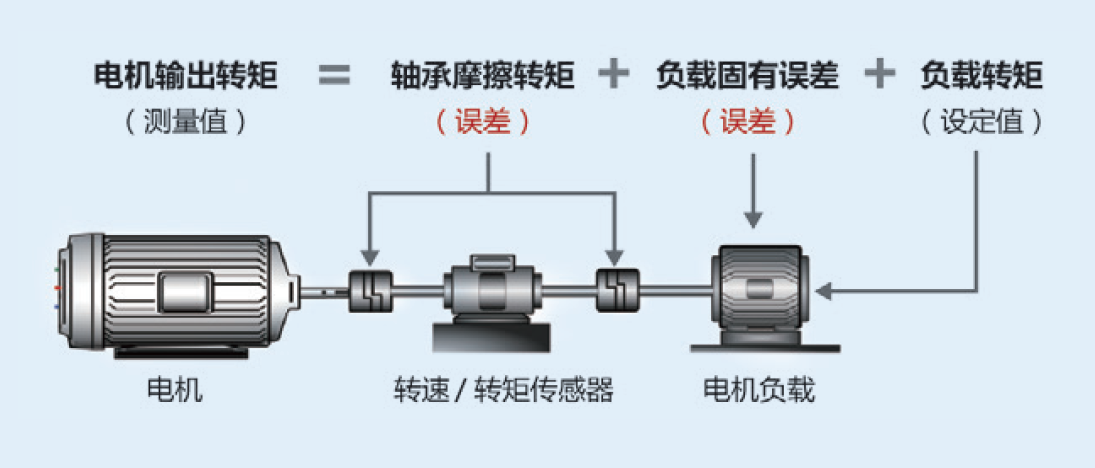
Figure 2 Reasons for the error
How to ensure the high precision of the motor test platform?
Zhiyuan Electronic MPT Motor Test System adopts advanced intelligent PID control architecture. It consists of three parts, a professional motor test software MotorTest, a motor operation module and a high-precision power analyzer. The motor speed and torque control accuracy is as high as 0.5%. The user provides the most accurate motor performance analysis.
In the test process, the high-precision power analyzer measures the speed and torque of the motor in real time and uploads it to the MotorTest software to compare the test data with the set value. If the two are deviated, the system control module is responsible for the speed of the motor. \The torque is adjusted by negative feedback, and then the sample comparison is performed again until the test data and the set value are consistent within the accuracy range, and then the system test and analysis are started to truly show the motor performance.

Figure 3 MPT motor test system architecture
The measured cases are based on the motor characteristic curve test. When the user sets the torque to 10~100N•m, the deviation of the traditional motor test platform is as high as 5%, while the torque control error of the MPT motor test system is as low as 0.36%, satisfying the user. The need for precise analysis of motor characteristics.
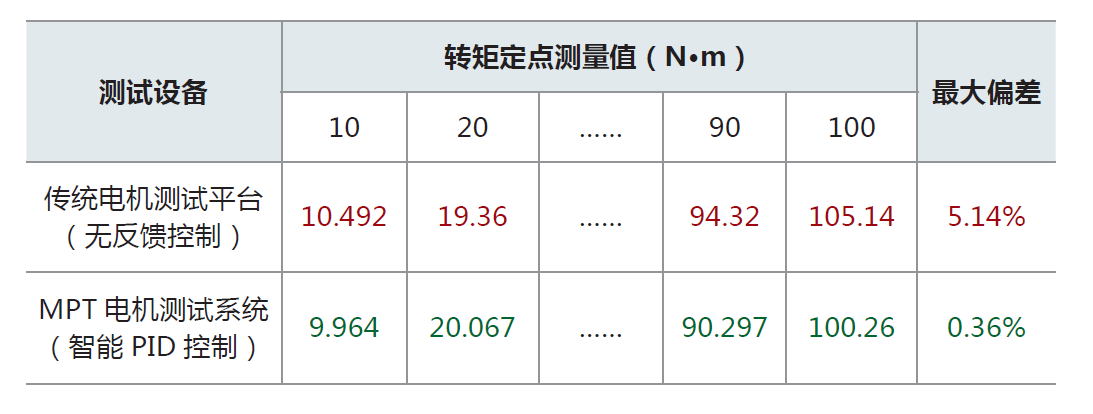
Figure 4 measured cases
Frequency: 50 Hz or 60Hz
Number of Poles: 4
Power: up to 3500KVA
Voltage: 110V-690V,High Voltage:3.3KV-13.8KV
Insulation: class H
Power Factor: 0.8
Voltage Regulation Rate: ±0.5%
Altitude: 1000M
Temperature Rise Class: class H
Next, we will discuss a more easily overlooked detail indicator in the motor test platform: control error.
Traditional motor test platform control error The traditional motor test platform can only provide open-loop control of the motor speed and torque, ignoring the error introduced by the fixture and motor load, and can not provide users with accurate motor measurement results.
Figure 1 Traditional Motor Test Platform Architecture
Causes of Error The causes of speed and torque error in the motor test system (dynamometer) can be summarized as follows:
1. In the motor drive system, when the torque output by the motor is transmitted to the sensor or load through the clamp, a small part will be lost as friction torque. Therefore, in order to drag the load normally, the motor will output a slightly larger torque than the load, causing an error between the torque measurement value and the set value.
2. The motor load itself has a control error, and the control signal does not exactly match the actual load torque;
3. Because there is a functional relationship between the speed and the torque, the above two errors also affect the speed.
Figure 2 Reasons for the error
How to ensure the high precision of the motor test platform?
Zhiyuan Electronic MPT Motor Test System adopts advanced intelligent PID control architecture. It consists of three parts, a professional motor test software MotorTest, a motor operation module and a high-precision power analyzer. The motor speed and torque control accuracy is as high as 0.5%. The user provides the most accurate motor performance analysis.
In the test process, the high-precision power analyzer measures the speed and torque of the motor in real time and uploads it to the MotorTest software to compare the test data with the set value. If the two are deviated, the system control module is responsible for the speed of the motor. \The torque is adjusted by negative feedback, and then the sample comparison is performed again until the test data and the set value are consistent within the accuracy range, and then the system test and analysis are started to truly show the motor performance.
Figure 3 MPT motor test system architecture
The measured cases are based on the motor characteristic curve test. When the user sets the torque to 10~100N•m, the deviation of the traditional motor test platform is as high as 5%, while the torque control error of the MPT motor test system is as low as 0.36%, satisfying the user. The need for precise analysis of motor characteristics.
Figure 4 measured cases
EvoTec Low Voltage Generator including Synchronous Generator ,Synchronous Lower Voltage Generator,
Evotec Synchronous Generato,1500Kva 50Hz Generator. Our alternator are widely used in industry, commercial, real estate, hospital, hotel, railway,telecommunications, data-centers and mining etc.
The specific technical features are listed below:
Speed: 1500rpm or 1800rpmFrequency: 50 Hz or 60Hz
Number of Poles: 4
Power: up to 3500KVA
Voltage: 110V-690V,High Voltage:3.3KV-13.8KV
Insulation: class H
Power Factor: 0.8
Voltage Regulation Rate: ±0.5%
Altitude: 1000M
Temperature Rise Class: class H
Ambient Temperature: 40
Overload:10% for 1 hour in every 12 hours
Degree of Protection: IP21 (IP23, IP44, IP54 on request)
Special Features:
- higher motor starting capability
- a reliable long life with superior class H insulation
- high thyristor load withstand capability for mobile phone and telecom applications
- ease of maintenance with integrated components and outboard exciter/rotating rectifier
- wide range of coupling discs/adaptor for single bearing configuration, suitable for wide range of engine brands
Synchronous Lower Voltage Generator

Synchronous Lower Voltage Generator
Synchronous Generator,Synchronous Lower Voltage Generator,Evotec Synchronous Generato,1500Kva 50Hz Generator
EvoTec Power Generation Co., Ltd , http://www.evotecgen.com